研究/活用事例
研究/活用事例一覧へ戻る
磁気浮上精密軌道制御システム
開発の背景、目的
機械製品の品質を向上させるためには精密な加工が必要ですが、それとともに機械部品の小型化の需要が高まりつつあります。そのため、直径0.05mmのミリング工具や直径0.01mmのドリルを用いた精密・微細加工がおこなわれるようになりつつあります。このような細い工具で加工するためには、刃の周速度を維持するために高速で回転させなければならず、強度が低いために加工中に簡単に破損してしまいます。そこで、工具に加わる力を制御しながら加工すれば破損を避けることができますが、力の検出と工具の位置決めを同時におこなう装置は大掛かりなものになってしまいます。また、加工物の水平面出しは面倒な作業です。これらの問題を解決することを目的に磁気浮上精密軌道制御システムを開発しました。
開発の結果、製品化情報
磁気浮上精密軌道制御システムとは、加工物を固定するテーブルを浮上させて、非接触で移動させるものです。目的とする移動経路、すなわち軌道上を正確に移動するように制御することができます。この磁気浮上軌道制御システムは次の特徴があります。
1. 非接触なので摩擦・磨耗がなく、精度の劣化がありません。
2. 移動範囲1mmに対して、軌道追従誤差は0.5μm以下です。
3. 支持剛性(弾性)を変えることができ、加工状態に合わせて力を調整することができます。
4. 加工物の位置と工具に加わる力を同時に検出することができます。
5. 固定する加工物の重量によって運動特性が変化しても、学習によって軌道追従性能を維
持する機能を持っています。
6. 姿勢制御により、水平面出しが可能です。
このように、このシステムは精密・微細な加工を行なうめために好適な機能を備えています。
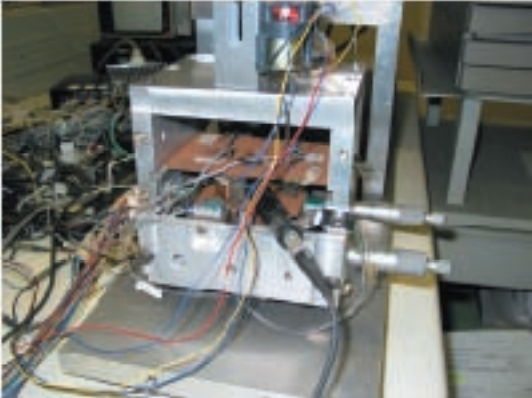
磁気浮上精密軌道制御システム
| 開発年度 | 平成14年度 |
|---|---|
| 事業、研究名 | 兵庫県産学官連携イノベーションセンター・インキュベート事業 |
| お問合せ先 | 安東 隆志、中本 裕之、浜口 和也、松井 博 |