研究/活用事例
研究/活用事例一覧へ戻る
ロボット用触覚センサ
開発の背景、目的
最近注目されている人間と共存するロボットは、予め決められた動作だけではなく、自分で判断して動作する必要があります。そして、判断するための情報を得るのに多くのセンサを必要とします。特に触覚情報を得るためのセンサは、人間が行っているような作業の代行や、人間との衝突などの検知に対して重要なセンサです。また、従来の産業用ロボットが多品種少量生産などへ応用の範囲を広げるためのセンサとしても応用できます。
そこでセンターでは、ロボットハンドの触覚となる触覚センサの開発に取り組んでいます。
開発の結果、製品化情報
開発したセンサの特徴は、圧力分布が計測できること、人間の皮膚と同じく表面が柔軟であることの2点です。表面が柔軟だと、物が触れたときにその物の形に合わせて変形するので接触面積が大きくなり、摩擦も大きくなります。また、計測した圧力分布は、変形した表面の形状に依存しているので、逆に圧力分布から形状を認識できると考えました。センサの大きさは、縦横100mmで厚みが5mmです。感圧導電性ゴムにより4096点の圧力分布の計測が可能です。ロボットハンドに取り付けて、把持の実験をした結果、直径20、25、30、35、40mmの丸棒の判別ができることが分かりました。
開発したセンサは、展示会などに出展して現在製品化への取り組みをしています。センサの面積や解像度を変えることで、ロボット以外の用途にも応用が可能です。
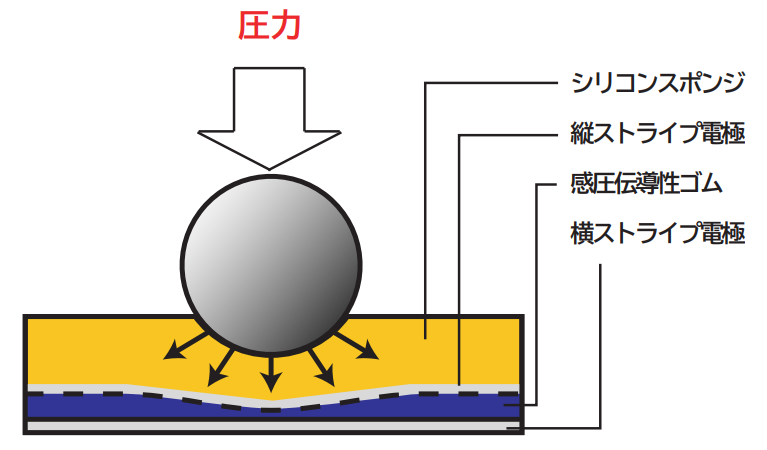
表面が柔軟な触覚センサ
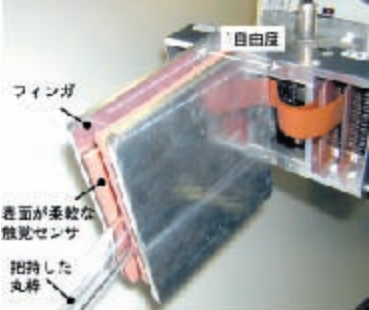
触覚センサを適用したロボットハンド
| 開発年度 | 平成13年度~14年度 |
|---|---|
| 事業、研究名 | 技術改善研究事業(県単独事業) |
| お問合せ先 | ■兵庫県立工業技術センター 中本 裕之、才木 常正、三浦 久典、北川 洋一、小坂 宣之 |