研究/活用事例
研究/活用事例一覧へ戻る
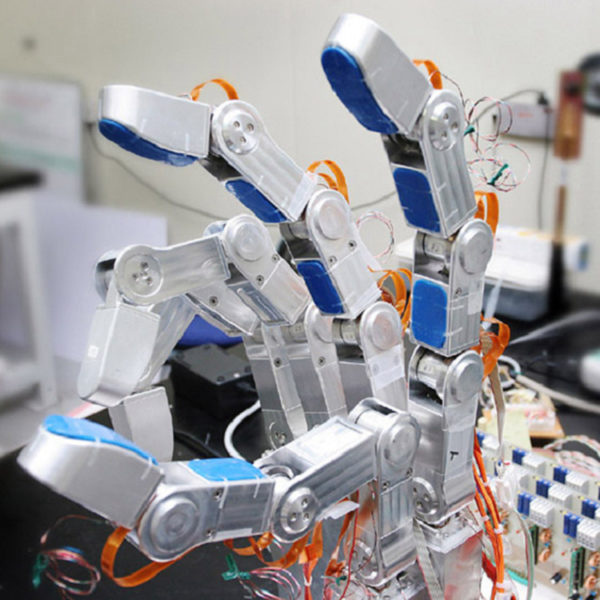
ユニバーサルロボットハンド
5本の指をもち、各指に4つの関節、3つのモータを備えたロボットハンドを開発しました。関節の回転角、関節にかかる力、そして指腹部には触覚として分布型圧力センサをもち、作業の遂行に必要な様々な情報を得ることができます。特に分布型圧力センサは、物体との接触のなじみが良くなるよう柔軟な素材を用い、物体の位置や姿勢、形状などをリアルタイムで計測できます。
ユニバーサルロボットハンド
多指ロボットハンドの必要性
輸出台数の伸びが著しい産業用ロボットの用途の拡大、次世代の人間共存型ロボットの実用化に向けて、人間の手のように器用で多様な作業が可能なロボットハンドの実現が望まれています。
そこで、工業技術センターが開発した分布型圧力センサを応用することで触覚と人間と同等の自由度を持つ5本指のユニバーサルロボットハンドの開発に取り組みました。
分布型圧力センサ
触覚となる分布型圧力センサは、各指の指腹部の3か所に配置しており、指先は102点、それ以外は70点の計測点をもちます。また、物体と接触する面にウレタンゲルという柔軟な素材を採用しており、柔軟な接触面を実現します。これにより、ユニバーサルロボットハンドは物体を把持した時に各部位に加わる圧力分布を検出できます。
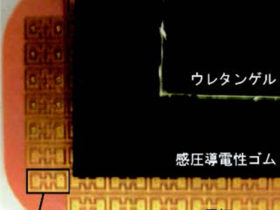
分布型圧力センサの構造
実験と今後の展開
人間の手は、物体を操作すると同時に触覚を使って物体の情報を得ています。ユニバーサルロボットハンドにも操作中の物体を認識させるため、分布型圧力センサで計測した時系列の圧力分布を使って物体の形状を認識する方法を考案しました。実験の結果、対象物の形状を識別できることがわかりました。
この開発は財団法人近畿高エネルギー加工技術研究所が主催するAMPIロボット研究会との共同研究の成果であり、今後そのメンバー企業から製品化が進められる予定です。

回転操作実験の様子
| 開発年度 | 平成17、18年度 |
|---|---|
| 事業、研究名 | 情報技術(共同研究) 平成17、18年度 兵庫県COEプログラム推進事業 |
| お問合せ先 | ■財団法人近畿高エネルギー加工技術研究所 ものづくり支援センター 尼崎市道意町7丁目1-8 Tel.06-6412-7736 Fax.06-6412-8266 http://www.ampi.or.jp |
| ■兵庫県立工業技術センター 情報技術部 中本 裕之 |