研究/活用事例
研究/活用事例一覧へ戻る
多関節ロボットを利用した外観検査装置
多関節ロボットに取り付けた工業用カメラからの画像情報を利用して、①多関節ロボットを制御する技術、②製品や部品の外観検査を行う画像処理技術の開発を行いました。開発した外観検査装置では、画像情報を基に多関節ロボットの制御を微調整することにより、未整列の検査対象部品でも製品の良否判定が可能になります。

デモ用の製品検査装置
背景
機械製品および電気・電子製品の製造工程において、製品や部品の外観検査を自動化したいという要望があります。また、未整列の複数部品の中から必要な部品を見つけ出し、それをピックアップする技術が必要とされています。そこで、テレビカメラを取り付けた多関節ロボットを利用して、これらの技術の開発に取り組みました。
デモ用の製品検査装置
デモ用に試作した装置を右上図に示します。この装置は、図中央にある多関節ロボットで飲料缶を把持し、図左側の視覚センサを利用して映像を取り込みます。取り込んだ映像を利用して、缶の側面に記載されたバーコードと、缶の底面に記載された製造年月日の読み取り検査を行います。この装置により、飲料缶の自動検査が可能になります。
外観検査装置
上図の多関節ロボットにテレビカメラを取り付け、外観検査を行う装置を開発しました。開発した装置を右下図に示します。この装置は、検査エリア内に並べられた合計100個(縦横に10個ずつ)の各部品について、部品の寸法などを計測し、製品の良否判定を行います。この検査で不良と判定された部品は多関節ロボットのピックアップ機能で取り除きます。映像情報を基に多関節ロボットの制御を微調整する機能を取り入れているので、未整列の検査対象部品でも検査可能です。
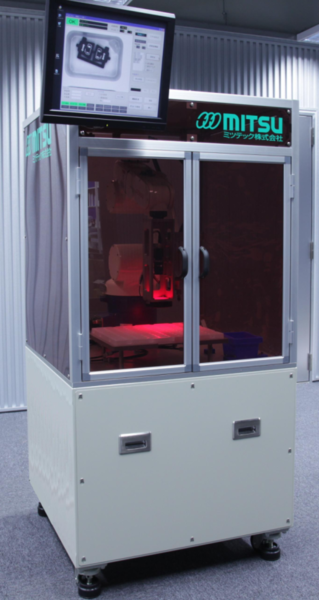
開発した外観検査装置
| 開発年度 | 平成21年度 |
|---|---|
| 事業、研究名 | 情報技術(共同研究) |
| お問合せ先 | ■ミツテック(株) 淡路市中村134-1 Tel.0799-85-2340 Fax.0799-85-2900 http://www.mitsu.co.jp/ |
| ■兵庫県立工業技術センター 技術支援部 金谷 典武 |